As a makerfaire project, I worked with a friend to build a quadcopter with some search-and-rescue features. The quadcopter’s FPV video is processed by OpenCV to detect humans in the vicinity.
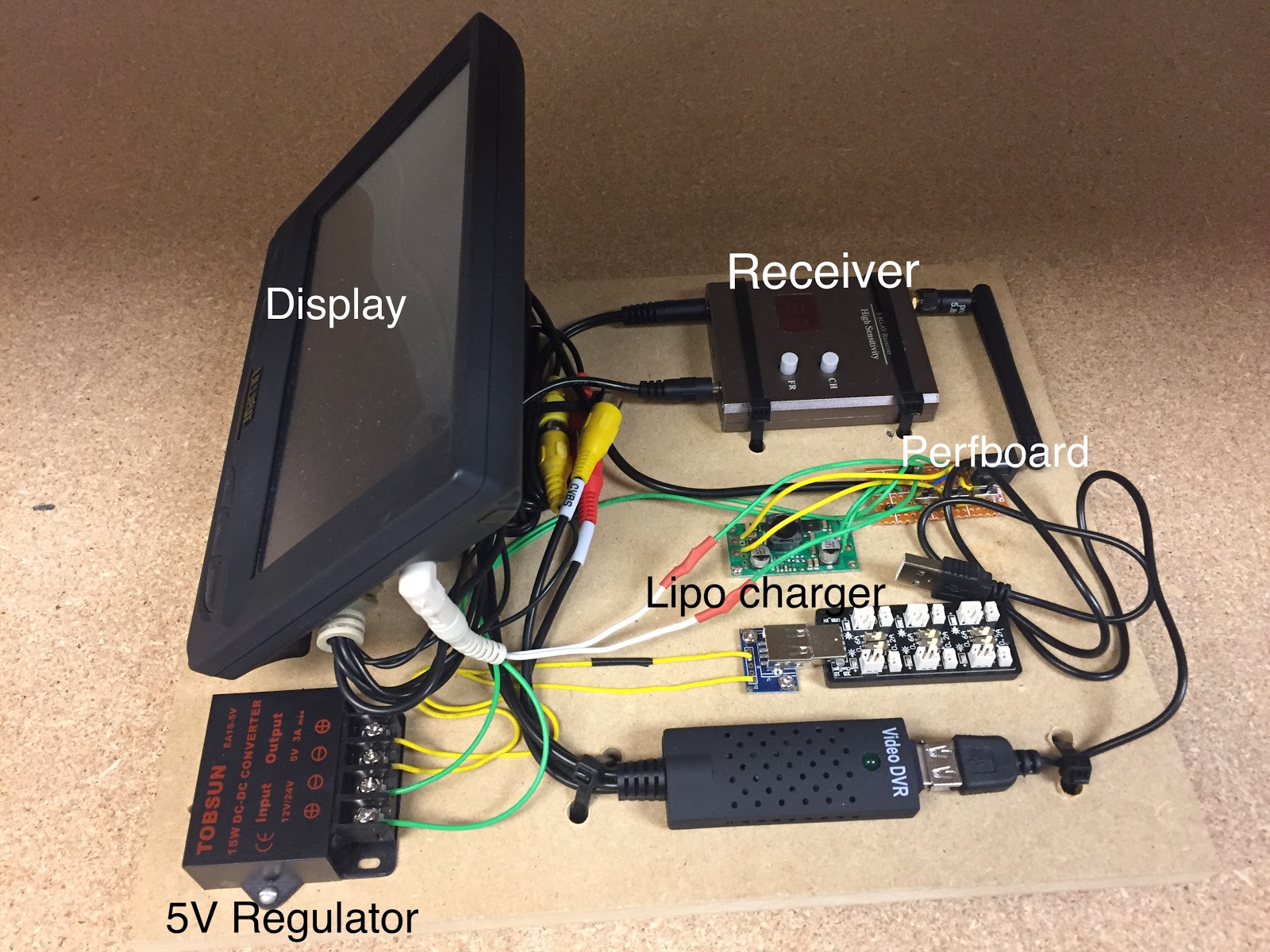
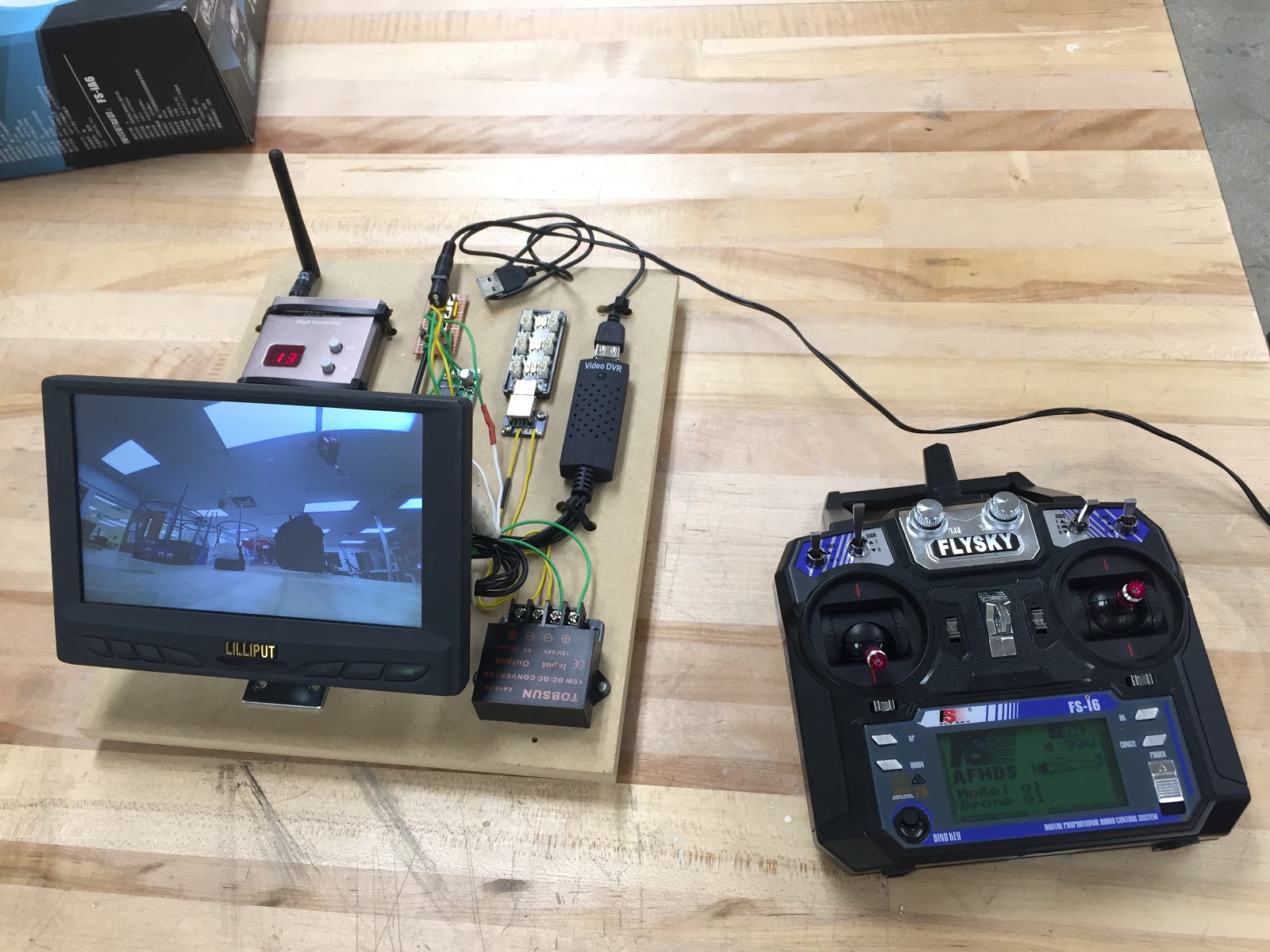
To build the quadcopter, we followed a guide for 3D printing and assembling a Tiny Whoop quadcopter. To maximize the flying time, we carefullly chose the lightest possible components and optimal batteries. The quadcopter contains a FPV camera that streams video to the receiver, where it is displayed on a low-latency monitor for the pilot and fed to a laptop for processing using computer vision. After tuning the PID parameters to stabilize the quadcopter’s flight, we adapted a Python script that detects humans in the video using the computer vision library OpenCV.
We also presented the project at Northwestern University’s High School Project Showcase, where it received a first-place award in engineering projects.
Here is the Python code we used followed by some photos of the components.
from imutils.object_detection import non_max_suppression
from imutils import paths
import numpy as np
import imutils
import cv2
screen_size=(1920,1080)
cap = cv2.VideoCapture(0)
hog = cv2.HOGDescriptor()
hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())
frame = 0
cv2.namedWindow("Result",cv2.WND_PROP_FULLSCREEN)
cv2.setWindowProperty("Result",cv2.WND_PROP_FULLSCREEN,cv2.WINDOW_FULLSCREEN)
while cap.isOpened():
ret, image = cap.read()
frame += 1
if (frame % 5 == 0):
frame = 0
image = imutils.resize(image, width=min(300, image.shape[1]))
orig = image.copy()
# detect people in the image
(rects, weights) = hog.detectMultiScale(image, winStride=(4, 4),padding=(8, 8), scale=1.05)
# draw bounding boxes
for (x, y, w, h) in rects:
cv2.rectangle(orig, (x, y), (x + w, y + h), (0, 0, 255), 2)
rects = np.array([[x, y, x + w, y + h] for (x, y, w, h) in rects])
pick = non_max_suppression(rects, probs=None, overlapThresh=0.65)
for (xA, yA, xB, yB) in pick:
cv2.rectangle(image, (xA, yA), (xB, yB), (0, 255, 0), 2)
# show the output images
cv2.imshow("Result", cv2.resize(image, screen_size))
key=cv2.waitKey(1) # ms delay
if key==27:
cap.release()
cv2.destroyAllWindows()
break
cap.release()
cv2.destroyAllWindows()